Roboter Programmieren | Software und Steuerung
- Details
- Zugriffe: 10940
Ob es sich um Industrieroboter oder Cobots handelt: Ohne passende Software und ein interaktives Roboter programmieren läuft nichts bzw. nichts einfach. Mit neuen Trends wie Cloud-basierten Programmen oder der Verwendung von künstlicher Intelligenz wird die Roboterprogrammierung immer leichter und damit zunehmend effizienter wird. Lesen Sie, wie das gehen kann und welche Software es dafür schon gibt.

Inhalt
- Smarte Roboter Software für toleranzbehaftete Prozesse
- Zukunft Roboter: Vier Trends in der Automatisierung
- Partner für sensor-adaptive Robotik
- User Interface vereinfacht Interaktion mit Roboter
- CNC + Roboterprogrammierung auf einer Plattform
- Roboterprogrammierung für die automatisierte THT-Bestückung
- Artiminds Webinare zum Einstieg in die Roboter Automation
- ABB Roboter für den 3D-Druck softwareseitig fitgemacht
- Intelligente Robotersoftware für die Montage Automation
- Kamerabasierte Sensorsoftware lässt Robotergreifer sehen
- Häufig gestellte Fragen
Smarte Roboter Software für toleranzbehaftete Prozesse
 13.12.2024 | Versucht man es über die herkömmliche Herangehensweise, toleranzbehaftete Prozesse wie sie im Kabelhandling vorkommen zu automatisieren, ist das oftmals eine große Herausforderung. Mit der smarten Robotersoftware lassen sich hierfür zuverlässige Lösungen ganz unkompliziert erstellen.
13.12.2024 | Versucht man es über die herkömmliche Herangehensweise, toleranzbehaftete Prozesse wie sie im Kabelhandling vorkommen zu automatisieren, ist das oftmals eine große Herausforderung. Mit der smarten Robotersoftware lassen sich hierfür zuverlässige Lösungen ganz unkompliziert erstellen.
Zukunft Roboter: Vier Trends in der Automatisierung
 04.10.2024 | Die produzierende Industrie und die Arbeitswelt sieht sich einem tiefgreifenden Wandel gegenüber. Insbesondere vier zentrale Trends prägen aktuell die Automatisierung. Um diesen Anforderungen gerecht zu werden, spielen taktile Roboter und ihre datenbasierte Programmierung eine Schlüsselrolle. Artiminds Robotics blickt hinter die Kulissen.
04.10.2024 | Die produzierende Industrie und die Arbeitswelt sieht sich einem tiefgreifenden Wandel gegenüber. Insbesondere vier zentrale Trends prägen aktuell die Automatisierung. Um diesen Anforderungen gerecht zu werden, spielen taktile Roboter und ihre datenbasierte Programmierung eine Schlüsselrolle. Artiminds Robotics blickt hinter die Kulissen.
Partner für sensor-adaptive Robotik
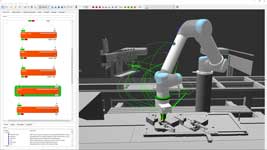
 22.06.2023 | Artiminds Robotics präsentiert zur Automatica 2023 mit den hauseigenen Softwarelösungen programmierte Anwendungen. Die Tools Robot Programming Suite (RPS) und Artiminds Learning & Analytics for Robots (LAR) vereinfachen dank des Low-Code-Ansatzes das Programmieren sensorbasierter Roboter-Anwendungen. Das Automatisieren bisher nur manuell lösbarer Fertigungsaufgaben wird damit möglich.
22.06.2023 | Artiminds Robotics präsentiert zur Automatica 2023 mit den hauseigenen Softwarelösungen programmierte Anwendungen. Die Tools Robot Programming Suite (RPS) und Artiminds Learning & Analytics for Robots (LAR) vereinfachen dank des Low-Code-Ansatzes das Programmieren sensorbasierter Roboter-Anwendungen. Das Automatisieren bisher nur manuell lösbarer Fertigungsaufgaben wird damit möglich.
User Interface vereinfacht Interaktion mit Roboter

30.05.2023 | Mit dem User Interface Kuka.Usertech hat Kuka die Konfiguration seiner Robotersteuerungen vereinfacht. Durch die benutzerfreundliche Oberfläche lassen sich mit der Software-Erweiterung Applikationsbefehle einfach erstellen und anwenden. Die Software stattet den Nutzer über einen Editor mit Graphical User Interface (GUI) über komplexe Routinen in der Kuka Robot Language (KRL) mit einfachen Inline-Formularen und Status Keys aus. Diese Applikationsbefehle zum Roboter programmieren werden zum Beispiel als Status Keys für einzelne Anwendungen oder in Form von Skripten für ganze Bedienabläufe in Kuka.Workvisual angelegt.
Selbst wenn Sie bislang noch keine Verwendung von Kuka.Usertech gehabt haben, lässt sich mit den erstellten Inline-Formularen, Status Keys, Schaltflächen und Meldungen die Steuerung des Roboters auf ihrem Bediengerät problemlos einrichten. Status Keys sind Schaltflächen auf dem Smartpad, über die oft wiederholte Befehle schnell und einfach eingegeben werden. Inline-Formulare sind vordefinierte Eingabemasken in Form von Templates, die den Einsatz von KRL-Routinen problemlos gestatten.
 Die ganze Welt der Igus Roboter
Die ganze Welt der Igus Roboter
Die Robotersteuerung lässt sich über die Benutzeroberfläche der Schnittstelle in wenigen Schritten konfigurieren und der Roboter ist schnell betriebsbereit.
Schnelle Inbetriebnahme per Drag-and-drop
Die neue Benutzerschnittstelle punktet besonders mit ihrer User Experience (UX). Ein intuitiv nutzbarer Editor auf dem PC mit Standard-Benutzeroberfläche sorgt für hohe Effizienz und bietet die Möglichkeit, die Konfigurationsdateien schnell und einfach per Drag-and-drop zu erstellen. Ein Eingreifen in die KRL ist durch das User Experience Design nicht erforderlich. Im Anschluss werden die Befehle als Optionspakete auf das Handbediengerät Kuka Smartpad für die Steuerung übertragen. Kopierfehler an den Benutzer-Schnittstellen werden so vermieden. Der Roboter ist schnell einsatzbereit.
Die vorkonfigurierten Inline-Formulare führen für den Menschen zu einer sicheren Bedienbarkeit des Computer Editors. Eingabefehler werden auf der graphischen Benutzeroberfläche direkt angezeigt und nicht erst beim Testen der Roboter-Steuerung entdeckt. Die Schnittstelle Kuka.Usertech ist mit allen Technologiepaketen des Herstellers kombinierbar.
CNC und Roboterprogrammierung auf einer Plattform
 15.02.2022 | Mit der Integration vom Roboter in die Werkzeugmaschine lassen sich die Vorteile der Automatisierung voll ausschöpfen. Mit der Entwicklung einer einheitlichen Programmierumgebung schafft Mitsubishi Electric eine direkte Robotersteuerung, mit der die Roboterprogrammierung über G-Codes im CNC Bearbeitungszentrum erfolgen kann.
15.02.2022 | Mit der Integration vom Roboter in die Werkzeugmaschine lassen sich die Vorteile der Automatisierung voll ausschöpfen. Mit der Entwicklung einer einheitlichen Programmierumgebung schafft Mitsubishi Electric eine direkte Robotersteuerung, mit der die Roboterprogrammierung über G-Codes im CNC Bearbeitungszentrum erfolgen kann.
Roboterprogrammierung für die automatisierte THT-Bestückung
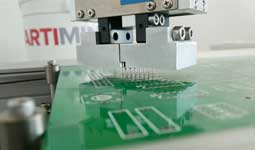 30.09.2020 | Die Robot Programming Suite RPS von Artiminds Robotics ermöglicht die Automation der THT-Bestückung. Die Software zur Roboterprogrammierung bringt einem Industrieroboter kraftgesteuerte Prozesse wie das Abtasten von Oberflächen oder kontrollierte Fügen bei – und das ganze per Drag and Drop.
30.09.2020 | Die Robot Programming Suite RPS von Artiminds Robotics ermöglicht die Automation der THT-Bestückung. Die Software zur Roboterprogrammierung bringt einem Industrieroboter kraftgesteuerte Prozesse wie das Abtasten von Oberflächen oder kontrollierte Fügen bei – und das ganze per Drag and Drop.
Artiminds Webinare zum Einstieg in die Roboter Automation
 11.05.2020 | Artiminds startet ab dem 20. Mai 2020 die Webinar-Reihe Automatisieren mit Robotern. Diese soll Unternehmen zeigen, wie ein schlanker Einstieg in die Robotik gelingt und welche Anforderung die Verantwortlichen bei der Integration von Robotern zu meistern haben. Die Webinar-Reihe umfasst neun Termine und zwei Themenschwerpunkte.
11.05.2020 | Artiminds startet ab dem 20. Mai 2020 die Webinar-Reihe Automatisieren mit Robotern. Diese soll Unternehmen zeigen, wie ein schlanker Einstieg in die Robotik gelingt und welche Anforderung die Verantwortlichen bei der Integration von Robotern zu meistern haben. Die Webinar-Reihe umfasst neun Termine und zwei Themenschwerpunkte.
ABB Roboter für den 3D-Druck softwareseitig fitgemacht
 13.01.2020 | ABB Roboter für den 3D-Druck lassen sich jetzt in nur 30 Minuten programmieren. Dafür wurden Funktionalitäten in die Simulations- und Offline-Programmier-Software „Robotstudio“ integriert. Die Neuheit wird nun erstmals auf der Robotik Messe Irex in Japan vorgestellt. Dank der neuen Software, die Teil des Powerpac-Portfolios ist, müssen Unternehmen keine manuelle Programmierung mehr durchführen und können so 3D Druck Bauteile schneller fertigen.
13.01.2020 | ABB Roboter für den 3D-Druck lassen sich jetzt in nur 30 Minuten programmieren. Dafür wurden Funktionalitäten in die Simulations- und Offline-Programmier-Software „Robotstudio“ integriert. Die Neuheit wird nun erstmals auf der Robotik Messe Irex in Japan vorgestellt. Dank der neuen Software, die Teil des Powerpac-Portfolios ist, müssen Unternehmen keine manuelle Programmierung mehr durchführen und können so 3D Druck Bauteile schneller fertigen.
Das 3D Printing Powerpac unterstützt als Teil von Robotstudio eine Vielzahl von 3D-Drucker Anwendungen. Darunter befinden sich Schweißen und Drucken mit Granulat oder Beton. Es eignet sich für die Produktion kleiner Volumina in hoher Variantenvielfalt.
Modellierung in einer halben Stunde
Konventionelle, maschinelle 3D-Druckverfahren sind zeitaufwendig: Für die Programmierung der Druckpfade sind Millionen Punkte und Bahnen zu plotten. Mit dem 3D Printing Powerpac lässt sich das Standard-Slicer-Softwaredesign in die Simulationsumgebung und den ABB Roboter-Code „übersetzen“. Damit können Anwender das CAD-Design bis hin zur finalen Modellierung des Produkts in einer halben Stunde realisieren.
 Forschungsprojekt für KI basierte Roboter Kalibrierung
Forschungsprojekt für KI basierte Roboter Kalibrierung
Der Markt für 3D-Druck soll laut Marktforscher Markets + Markets bis 2024 auf 34,8 Milliarden US-Dollar anwachsen. Dies ist auch auf die Entwicklung neuer, industrieller 3D-Druck Filament zurückzuführen.
„Mit unserer 3D Druck Software bieten wir unseren Kunden einen zügigeren 3D-Druck. Mit unseren leistungsfähigen ABB Robotern können Unternehmen nun qualitativ hochwertige Objekte für viele industrielle Anwendungen effizient herstellen“, betont Steven Wyatt, Head of Portfolio and Digital des ABB-Geschäftsbereichs Robots und Fertigungsautomation.
Intelligente Robotersoftware für die Montage Automation
 10.09.2018 | Das Fraunhofer IPA stellt die Robotersoftware drag+bot vor, die den Programmieraufwand von Robotern auf ein Minimum reduziert. Sie liefert fertige Programmbausteine, die sich über eine graphische Bedienoberfläche schnell und intuitiv zu komplexen Roboterapplikationen zusammenfügen lassen.
10.09.2018 | Das Fraunhofer IPA stellt die Robotersoftware drag+bot vor, die den Programmieraufwand von Robotern auf ein Minimum reduziert. Sie liefert fertige Programmbausteine, die sich über eine graphische Bedienoberfläche schnell und intuitiv zu komplexen Roboterapplikationen zusammenfügen lassen.
Zusätzlich vereinfachen Bedien- und Eingabehilfen die Parametrisierung der Bausteine. Damit sei kein Expertenwissen mehr nötig, um Roboter verschiedener Hersteller umzuprogrammieren.
Die Robotersoftware Pitasc für kraftgeregelte Montageprozesse ermöglicht es, bisher manuell ausgeführte Prozesse wie das Montieren von Schaltschränken, wirtschaftlich sinnvoll zu automatisieren. Die Robotersoftware ist innovativ, weil die einmal modellierte Aufgabe auf neue Werkstückvarianten, andere Robotertypen und auf Roboter anderer Hersteller übertragbar ist. Zudem ist sie ähnlich einem Baukastensystem strukturiert:
Die Robotersoftware enthält vielseitig einsetzbare und wiederverwendbare Programmbausteine, die Systemintegratoren bei der Einrichtung eines Robotersystems individuell zusammenstellen können und die direkt einsetzbar ist. Pitasc ist in drag+bot integriert und kann somit einfach genutzt werden.
 Sicherheitsbremse schützt Robco Roboter-Bausatz
Sicherheitsbremse schützt Robco Roboter-Bausatz
Wenn ein Unternehmen beispielsweise Montageprozesse stärker automatisieren möchte, ist es entscheidend, die hierfür technisch und wirtschaftlich geeigneten Prozesse zu ermitteln. Das IPA bietet zu diesem Zweck die Automatisierungs-Potenzialanalyse an, mit der Unternehmen fundiertes Entscheiderwissen über all ihre Montagearbeitsplätze und -linien in der Produktion und geeignete Automatisierungsmöglichkeiten erhalten. So lassen sich „Quick wins“ systematisch erschließen und darauf aufbauend Konzepte erstellen und umsetzen.
Jetzt erfolgt diese Analyse erstmals mithilfe einer App, die eine Datenbasis enthält, den Vergleich einer neu geplanten mit einer bereits realisierten Lösung ermöglicht. Damit lässt sich der Planungsprozess deutlich vereinfachen.
Kamerabasierte Sensor Software lässt Robotergreifer sehen
 17.06.2018 | Auf Basis ihrer Forschungen ist es dem Startup Rovi Robot Vision weltweit erstmals gelungen, teure traditionelle elektronische Sensoren durch eine neue Software und gängige Kameras zu ersetzen. Wegen der direkten Ansteuermöglichkeit des Motors verwendeten die Tüftler Greifer von Gimatic.
17.06.2018 | Auf Basis ihrer Forschungen ist es dem Startup Rovi Robot Vision weltweit erstmals gelungen, teure traditionelle elektronische Sensoren durch eine neue Software und gängige Kameras zu ersetzen. Wegen der direkten Ansteuermöglichkeit des Motors verwendeten die Tüftler Greifer von Gimatic.
Häufig gestellte Fragen
Welche Programmiersprache wird für Roboter verwendet?
Roboter werden mit verschiedenen Programmiersprachen gesteuert, abhängig vom Modell und Anwendungsfall. Häufig eingesetzt werden C++ und Python, insbesondere in der Robotikforschung und -entwicklung. ROS (Robot Operating System) bietet zudem eine Sammlung von Werkzeugen und Bibliotheken, die speziell für die Robotik konzipiert sind. Die Wahl der Sprache hängt oft von der Komplexität und Spezifikation des Roboters ab.
Wie programmiert man ein Roboter?
Das Programmieren eines Roboters erfordert spezifische Software und oft eine zugehörige Programmiersprache. Zunächst definiert man die gewünschten Bewegungsabläufe und Funktionen. Mithilfe von Umgebungen wie ROS (Robot Operating System) oder speziellen Herstellersoftware kann man den Roboter dann Schritt für Schritt instruieren. Je nach Robotermodell können auch grafische Interfaces oder Teach-in-Verfahren eingesetzt werden, um den Ablauf intuitiv zu gestalten.
Welche Programmiersprache verwendet Kuka?
Für Kuka Roboter wird die hauseigene Programmiersprache KRL (KUKA Robot Language) verwendet. KRL kombiniert Eigenschaften von herkömmlichen Programmiersprachen mit spezifischen Befehlen für die Robotik. Sie ermöglicht es Anwendern, präzise Bewegungsabläufe, Logiken und Bedingungen für den Roboter zu definieren, wodurch er für eine Vielzahl von industriellen Anwendungen optimiert werden kann.
Wie funktioniert ein Roboter?
Ein Roboter funktioniert durch die Kombination von Mechanik, Elektronik und Software. Sensoren erfassen Informationen aus der Umgebung, die durch einen Mikrocontroller oder Computer verarbeitet werden. Programmiersprachen geben Befehle, wie sich der Roboter verhalten soll. Antriebssysteme und Aktuatoren setzen diese Befehle in physische Bewegungen um, wodurch gezielte Aktionen ermöglicht werden.
Quellenangabe: Dieser Beitrag basiert auf Informationen folgender Unternehmen: ABB, Artiminds, Fraunhofer, Kuka, Mitsubishi Electric, Rovi.
Das könnte Sie auch interessieren...

Künstliche Intelligenz | Trends und Entwicklungen

Autonomes Fahren | Einsteigen und staunen!

Synchronmotor | Drehstrommotor mit konstanter Drehzahl

KI-gestützte Bildverarbeitung vereinfacht Fertigungsprozesse

Edge-KI-Sensorik für Industrie, Medtech und Umwelt

KI Assistent im Unternehmensalltag als Wegbereiter für AI

Angela Struck ist Chefredakteurin des developmentscouts und freie Journalistin sowie Geschäftsführerin der Presse Service Büro GbR in Ried.