Sensor für sicheres autonomes Fahren bei jeder Witterung
- Details
- Zugriffe: 5232
 Mitsubishi Electrics Information Technology R&D Center in Japan hat eine neue Sensortechnologie entwickelt, die eine hochpräzise Erfassung von Fahrzeugperimetern auch bei dichtem Nebel oder starkem Regen ermöglicht. Die Technologie soll eine robuste Funktion von autonomen und assistierten Fahrsystemen auch bei rauen Witterungsbedingungen, unter denen die Erkennungsgenauigkeit konventioneller Sensoren abnimmt, ermöglichen.
Mitsubishi Electrics Information Technology R&D Center in Japan hat eine neue Sensortechnologie entwickelt, die eine hochpräzise Erfassung von Fahrzeugperimetern auch bei dichtem Nebel oder starkem Regen ermöglicht. Die Technologie soll eine robuste Funktion von autonomen und assistierten Fahrsystemen auch bei rauen Witterungsbedingungen, unter denen die Erkennungsgenauigkeit konventioneller Sensoren abnimmt, ermöglichen.
Die allgemeine Forschung und Entwicklung zu Sensoren, die in autonomen und assistierten Fahrsystemen verbaut werden, ist auch weiterhin auf die Verbesserung der Erkennungsgenauigkeit konzentriert. Diese Systeme beruhen auf verschiedenen Arten von Sensoren, die Positionen, Geschwindigkeiten, Größen usw. von Hindernissen im Weg von Fahrzeugen bestätigen. Bisher lieferten herkömmliche Systeme mit solchen Sensoren jedoch keine zuverlässige Leistung bei beispielsweise dichtem Nebel oder starkem Regen, da diese Bedingungen die Durchlässigkeit von elektrischen- und Laser-wellen, sowie die Kamerasicht verschlechtern.
 Schrittmotor | Präzise low cost Positionierung
Schrittmotor | Präzise low cost Positionierung
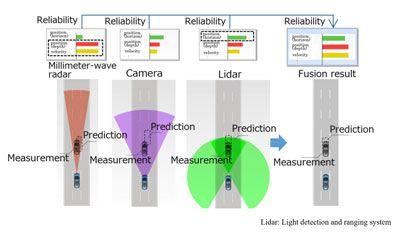
Die neuentwickelte robuste Technologie wählt und kombiniert Daten von gleich mehreren Sensoren am Fahrzeug basierend auf ihrer Zuverlässigkeit. Von verschiedenen Sensoren erfasste Zeitreihendaten (Geschwindigkeit, Breite, Ausrichtung, Abstand usw.) werden in Echtzeit analysiert, um vorherzubestimmen, wie zuverlässig die Daten der einzelnen Sensoren je nach Wetterlage basierend auf den entsprechenden Funktionen sind. Durch die Auswahl und Kombination von Daten mit einer so ermittelten hohen Zuverlässigkeit ist eine hochpräzise Erkennung auch bei rauen Witterungsbedingungen möglich.
Sichere Vollbremsung im Testzentrum
 Die Technologie wurde in einem Testzentrum in Japan in einem Fahrzeug mit autonomen Vollbremssystem (AEB) eingesetzt, um die Leistung von echten Fahrzeugen bei rauem Wetter zu überprüfen. Dabei wurde bestätigt, dass das AEB-System selbst unter Bedingungen, bei denen gängige Sensoren sonst stark an Genauigkeit einbüßen, eine sichere Vollbremsung durchführen konnte.
Die Technologie wurde in einem Testzentrum in Japan in einem Fahrzeug mit autonomen Vollbremssystem (AEB) eingesetzt, um die Leistung von echten Fahrzeugen bei rauem Wetter zu überprüfen. Dabei wurde bestätigt, dass das AEB-System selbst unter Bedingungen, bei denen gängige Sensoren sonst stark an Genauigkeit einbüßen, eine sichere Vollbremsung durchführen konnte.
In Zukunft wird das Unternehmen die Technologie in tatsächlichen Umgebungen weiter testen und die Entwicklung mit dem Ziel einer Vermarktung ab 2023 fortsetzen. Man geht davon aus, dass die Technologie in Zukunft in autonomen Fahrzeugen eingesetzt werden kann, um sichere und präzise Spurwechsel auch bei rauen Witterungsbedingungen zu gewährleisten.
Auswahl und Kombination von Daten verschiedener Sensoren
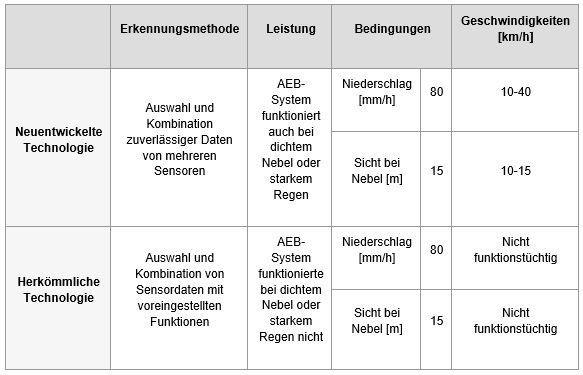
Unterschiedlichen Sensoren erfassten Zeitreihendaten wie Geschwindigkeit, Breite, Ausrichtung und Abstand, die mit den auf den entsprechenden Funktionen basierenden prognostizierten Daten und Werten verglichen wurden. Echtzeit-Berechnungen prognostizierten die Zuverlässigkeit der Daten der einzelnen Sensoren, die vom Wetter abhängen. Das System wählte dann als sehr zuverlässig prognostizierte Daten aus und kombinierte sie. So ließ sich die Funktion von autonomen und assistierten Fahrsystemen auch bei dichtem Nebel oder starkem Regen demonstrieren.
AEB-Systems auch bei rauem Wetter leistungsfähig
 Die Tests, die raue Witterungsbedingungen simulieren, erfolgten in einer Einrichtung des gemeinnützigen Japan Automobile Research Institute. Es wurde ein AEB-System bei starkem Regen (Niederschlag von 80 mm/h) mit einer maximalen Fahrzeuggeschwindigkeit von 40 km/h getestet. Dank der erfolgreichen Erkennung von Objekten, die die Notbremsung auslöste, konnte eine normale Funktion des AEB-Systems belegt werden. Zudem wurde das System bei dichtem Nebel mit einer Sichtweite von 15 m und einer Fahrzeuggeschwindigkeit von 10 bis 15 km/h getestet. Alle Tests bei starkem Regen wurden nachts wiederholt. Außerdem erfolgten Tests, bei denen die Erkennungsgenauigkeit der Kamera durch Hintergrundbeleuchtung bei einer Fahrzeuggeschwindigkeit von 10 bis 40 km/h erheblich beeinträchtigt war. Unter allen Bedingungen wurde das AEB-System erfolgreich aktiviert.
Die Tests, die raue Witterungsbedingungen simulieren, erfolgten in einer Einrichtung des gemeinnützigen Japan Automobile Research Institute. Es wurde ein AEB-System bei starkem Regen (Niederschlag von 80 mm/h) mit einer maximalen Fahrzeuggeschwindigkeit von 40 km/h getestet. Dank der erfolgreichen Erkennung von Objekten, die die Notbremsung auslöste, konnte eine normale Funktion des AEB-Systems belegt werden. Zudem wurde das System bei dichtem Nebel mit einer Sichtweite von 15 m und einer Fahrzeuggeschwindigkeit von 10 bis 15 km/h getestet. Alle Tests bei starkem Regen wurden nachts wiederholt. Außerdem erfolgten Tests, bei denen die Erkennungsgenauigkeit der Kamera durch Hintergrundbeleuchtung bei einer Fahrzeuggeschwindigkeit von 10 bis 40 km/h erheblich beeinträchtigt war. Unter allen Bedingungen wurde das AEB-System erfolgreich aktiviert.
Prognosefunktionen für Umgebungserkennung
Ein Lidar Sensoren bietet keine gute Leistung bei Nebel (in der Luft enthaltenes Wasser absorbiert Impulslasersignale). Daher kann das System anhand von Daten von einem Lidar unter solchen Bedingungen vorhandenen Nebel bestimmen. Die Ergebnisse dieses Tests werden bei der Berechnung der Zuverlässigkeit berücksichtigt, um genauere Erkennungsfunktionen zu ermöglichen.
Das könnte Sie auch interessieren...

Künstliche Intelligenz | Trends und Entwicklungen

Predictive Maintenance für Robotik, Maschinen und Anlagen

Mitsubishi Electric | Automating the World

Cobot | Kollaborierende Roboter als neuen Mitarbeiter entdecken

Intelligente CNC Steuerung für Werkzeugmaschinen
