FTS sicher stoppen – Anhalteweg ist der Schlüssel

Fahrerlose Transportsysteme (FTS) sind in der Intralogistik längst Standard. Damit FTS sicher zwischen Menschen, Material und Infrastruktur navigieren, müssen sie in jeder Situation verlässlich zum Stillstand kommen – auch bei Nennlast, auf Gefälle oder bei schwankender Batteriespannung. Entscheidend ist dabei eine häufig unterschätzte Tatsache: Der Anhalteweg eines FTS ist nicht „die eine Zahl“ aus dem Datenblatt, sondern das Ergebnis aus Sensorik, Steuerung, Energieversorgung und Bremssystem. Mayr Antriebstechnik bietet hierfür Lösungen.
Theorie und Praxis: Totzeiten verlängern den Anhalteweg
Normativ ist die Richtung klar: Das Bremssystem eines Fahrerlosen Transportsystems muss das Fahrzeug selbst unter ungünstigen Bedingungen innerhalb der Sensorreichweite sicher stoppen können. In der Praxis bedeutet das, dass Sicherheitsbremsen nach dem Fail-Safe-Prinzip eine zentrale Rolle spielen. Sie sind im energielosen Zustand durch Federkraft geschlossen und liefern das erforderliche Bremsmoment auch bei Not-Stopp, Stromausfall oder Kabelbruch.
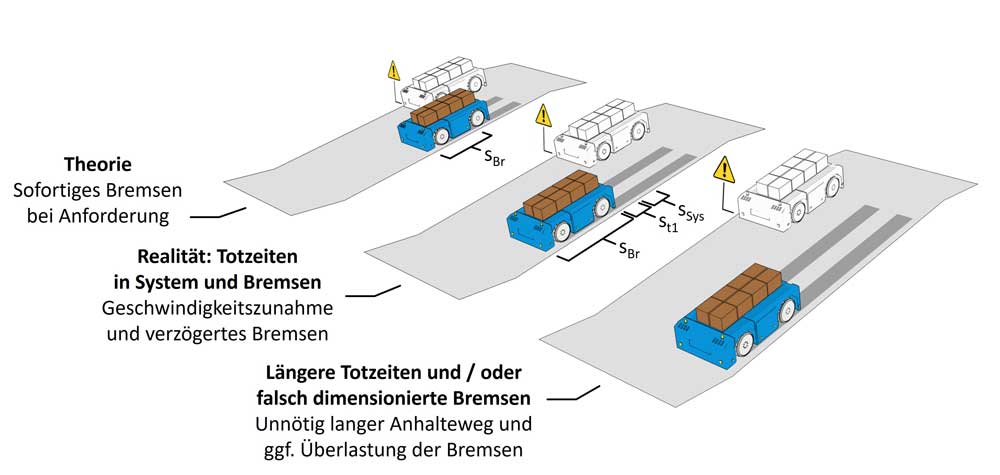
Der Anhalteweg eines FTS umfasst mehr als den reinen Bremsweg. Denn bevor das Bremsmoment tatsächlich wirksam wird, entstehen in der Kette aus Detektion, Steuerungsentscheidung und Aktorik messbare Verzögerungen.
„In der Theorie entfällt ohne Fahrer der menschliche Reaktionsweg und die Bremse würde bei entsprechender Anforderung sofort einfallen und das Fahrzeug verzögern“, erläutert Andreas Merz, Produktmanager bei Mayr in Mauerstetten. „In der Realität hat aber jede Bremse eine bestimmte Tot- bzw. Schaltzeit, die sogenannte t1-Zeit, während der sich das Bremsmoment aufbaut. Hinzu kommen die Totzeiten der vorgelagerten Sensorik, der Steuerung und des Bremsschützes.“
Diese System-Totzeiten sind im FTS-Alltag sicherheitsrelevant, weil das Fahrzeug in dieser Zeit weiterrollt oder auf Gefälle sogar beschleunigt. „Während dieser Totzeiten bewegt sich auch das fahrerlose Fahrzeug natürlich weiter oder beschleunigt sogar, zum Beispiel aufgrund eines Gefälles“, ergänzt Andreas Merz. „In beiden Fällen wird der Bremsweg länger.“
Das Risiko steigt, wenn Tot- und Schaltzeiten unnötig groß sind oder Bremsen nicht passend ausgelegt wurden. Für Hersteller und Betreiber von Fahrerlosen Transportsystemen wird damit eine saubere Auslegung inklusive verifizierter Schaltzeiten über die Lebensdauer zum Kernpunkt der Sicherheitsargumentation.
Intelligente Zustandsüberwachung statt starrer Intervalle
 Roba Brake Checker für das Bremsenmonitoring
Roba Brake Checker für das Bremsenmonitoring Die Roba-Servostop Bremse ist leicht und schlank.
Die Roba-Servostop Bremse ist leicht und schlank. Die Roba-stop M Motorbremse ist sehr robust.
Die Roba-stop M Motorbremse ist sehr robust.
Um Schaltzeiten, Betriebszustand und elektrische Parameter im Blick zu behalten, kommen Monitoring-Lösungen ins Spiel. Das nachrüstbare Modul Roba brake-checker arbeitet sensorlos und überwacht die Funktion über die Analyse charakteristischer Strom- und Spannungsverläufe in der Zuleitung.
Zusätzlich zu klassischen Signalen liefert es weitere Messgrößen wie Schaltzeiten, Spannungen oder Spulenwiderstand, um Aussagen zu Zustand und Verhalten der Bremse abzuleiten. In Kombination mit dem Modul Roba gateway wird die Lösung netzwerkfähig: Die Daten können per Ethernet dauerhaft ausgelesen werden.
Für FTS-Hersteller kann dieser Ansatz auch den Konformitäts- und Nachweisprozess erleichtern: Statt ausschließlich über pauschale Wartungsintervalle zu argumentieren, stehen konkrete Zustands- und Schaltzeitdaten zur Verfügung, die die Funktionsfähigkeit belegbar machen. „Aktuell bieten wir die Module als kompakte Einheit in einem Gehäuse an, das auf der Hutschiene positioniert wird“, erklärt Andreas Merz.
„Für die immer kompakteren Konstruktionen sind teils aber hoch integrierte Lösungen gefordert. Wir haben die Lösung daher auf einen Chip gebracht, der die komplette Funktionalität der Roba brake-checker und Roba gateway Module bietet. Der Controller wird direkt in die Steuerung des Anwenders integriert und spart so noch einmal deutlich Platz. Im Moment ist diese Variante bei ersten Kunden in der Erprobung.“
Mobile Energieversorgung: stabile Funktion und weniger Verbrauch
Bei Fahrerlosen Transportsystemen kommt ein weiterer Faktor hinzu: die Batteriespannung ist nicht konstant. Ein Praxisvorteil des Moduls ist deshalb die Fähigkeit, die Bremse auch bei schwankender Versorgung stabil zu speisen, indem eine geregelte Ausgangsspannung bereitgestellt wird. So soll die Bremse zuverlässig öffnen und definierte Schaltzeiten einhalten – auch wenn die Batteriespannung abfällt.
Zudem wird nach dem Lüften die Haltespannung abgesenkt, um den Energiebedarf zu reduzieren. Laut Hersteller lässt sich der Energieverbrauch der Bremse dadurch um bis zu 90 % senken – ein Hebel, der in FTS-Flotten direkt auf Reichweite und Batteriestress wirkt.
Relevanz für Hubeinrichtungen und Aufbauten auf FTF/FTS
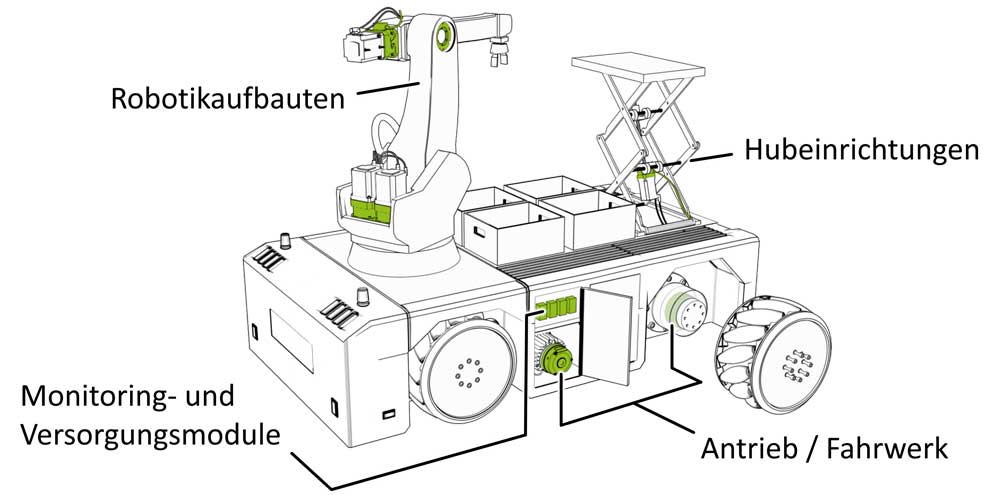
Die Systembetrachtung endet bei Mayr aber nicht am Fahrantrieb. Auch Hubeinrichtungen auf Fahrerlosen Transportfahrzeugen sowie montierte Roboterarme verlangen eine robuste Bremsauslegung und verlässliche Überwachung. Gerade bei vertikalen Achsen kann die Belastung der Bremse durch die Geschwindigkeitszunahme vor dem Einfallen steigen.
„Im Fall von vertikal bewegten Achsen oder Roboterarmen können die Bremsen etwa aufgrund der Geschwindigkeits-Zunahme vor dem Einfallen der Bremse überlastet werden.“ Das kann den Bremsweg verlängern oder im Extremfall zum Lastabsturz führen. Entsprechend wichtig sind passende Dimensionierung, belastbare Schaltzeiten und ein Monitoring, das den realen Zustand der Bremse kennt.
